

Todos los productos
Persona de Contactar Ahora :
Fiona Luo
Número de teléfono :
+8618013106371
Whatsapp :
+8618000732351
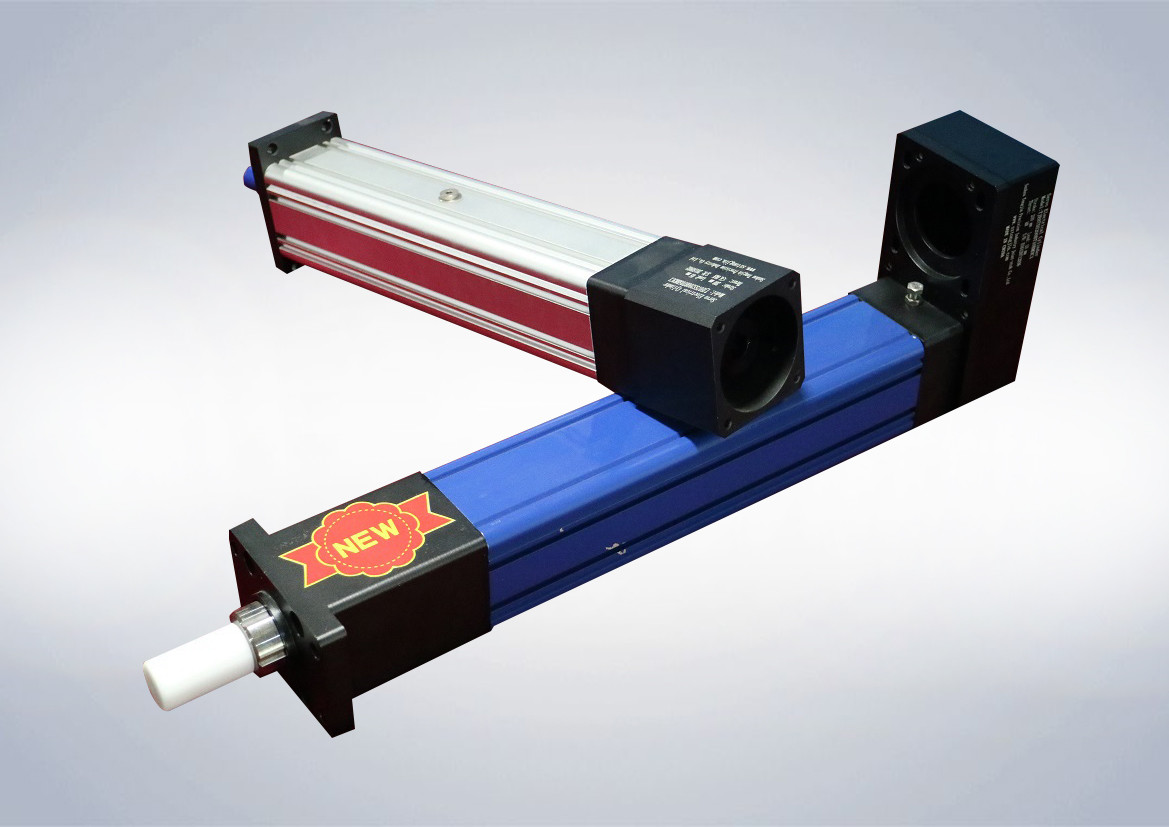
El cilindro eléctrico linear impermeable 220V con muchos carga los tipos de conexión 500mm/S










| Lugar de origen | China |
|---|---|
| Nombre de la marca | TJ |
| Certificación | ISO9001:2008,CE |
| Número de modelo | TJE075 |
| Cantidad de orden mínima | 1 PC |
| Precio | negotiable |
| Detalles de empaquetado | embalaje externo: cartón o caja no de madera; embalaje del amortiguador: Espuma de EPE |
| Tiempo de entrega | 3-4 semanas |
| Condiciones de pago | T/T, pago del 30% por adelantado, el 70% antes de entrega |
| Capacidad de la fuente | 800 PC por mes |
Datos del producto
| Material | De aluminio | Color | estándar: el blue&silvery de la marina de guerra, otros puede ser modificado para requisitos particu |
|---|---|---|---|
| Velocidad | hasta 500mm/s | Repetibilidad | ±0.01mm |
| Movimiento | 50~600m m | Fuerza de la salida | hasta 6KN |
| tipo de conexión del motor | linear/paralelo | antirotación interno | Con/fuera |
| VENTAJA DEL TORNILLO | 4,5,10,20,40m m | tipo de conexión de la carga | masculino, femenino, U-perno, bisagra principal de la bola y modificado para requisitos particulares |
| Resaltar | actuador linear impermeable 500mm/S,Actuador linear rápido de la prenda impermeable,Cilindro eléctrico linear de la conexión de la carga |
||
Descripción de producto
Cilindro eléctrico con muchos tipos de conexión de la carga, 9001:2008 máximo de la velocidad y de la precisión de la velocidad 500mm/s ISO
1. Modelo Definition del producto
Ejemplo: LOS110 S300 B R 08 B M C 2 P11 O/C N/P
|
Los110—serieno.
TJE040: 44×44m m TJE065: 64×64m m TJE075: 75×75m m TJE095: 93×93m m TJE110: 111×111m m TJE135: 134×134m m |
M-cilindro que monta el tipo
M1: Soporte lateral doble M2: Soporte lateral del turnnion M3: Soporte delantero del reborde M4: Soporte posterior del reborde M5: Soporte posterior de la horquilla M6: Soporte del eje posterior MX: Modificado para requisitos particulares |
|
S300—movimientoeficaz
TJE040: 50-200m m TJE065: 50-250m m TJE075: 50-600m m TJE095: 50-800m m TJE110: 50-1000m m TJE135: 50-1200m m |
C — tipo de conexión de la carga
C1: Varón C2: Hembra C3: U-perno C4: Bisagra principal de la bola CX: Modificado para requisitos particulares |
|
Tipo del B-tornillo
: Tornillo de la cumbre B: Tornillo de la bola C: Tornillo del rodillo |
2-Number de los interruptores de límite
(El defecto es interruptor normalmente abierto de NPN) |
|
R-Anti-rotación
R: Con T: Sin (TJE040 siempre sin esta función)
|
Interruptores de O/C-Limit
O: Normalmente abierto C: Normalmente cercano |
|
08 — ventaja del tornillo
TJE040: 4m m TJE065: 4, 5, 10, 16,20m m TJE075: 4, 5, 10, 20, 40m m TJE095: 4, 5, 6, 8, 10, 25m m TJE110: 5, 6, 8, 10, 20, 32m m TJE135: 10, 20, 50m m |
Tipo de N/P-Sensing
N: NPN P: PNP |
|
B-motor que monta el tipo
B: Paralelo |
Marca:
1) Para asegurar el movimiento eficaz, dos extremos necesitan ser espacio reservado de 5m m.
2) El sensor no se podría montar en el mismo lado del motor cuando el motor es paralelo montado.
2. Esfuerzo de torsión servo eléctrico de la impulsión del cilindro y
tabla de la selección del poder
| Conexión del motor | Paralelo (impulsión de correa) | ||||||||||||||
| Ratio de reducción | 1 | 1,5 | 3 | 5 | 10 | ||||||||||
| Ventaja del tornillo | [milímetro] | 4 | |||||||||||||
| Poder del motor | [Kilovatio] | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | ||||
| Esfuerzo de torsión clasificado del motor | [N.M] | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | ||||
| Velocidad clasificada del motor | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||
| Fuerza clasificada del cilindro | [KN] | 1,76 | 3,53 | 2,65 | 5,29 | 5,29 | 6 | 6 | 6 | 6 | 6 | ||||
| Cilindro Max. Force | [KN] | 6 | |||||||||||||
| Velocidad del cilindro | [mm/s] | 0-200 | 0-130 | 0-65 | 0-40 | 0-20 | |||||||||
| Conexión del motor | Linear (impulsión directa de acoplamiento) | ||||||||||||||
| Ratio de reducción | 1 | 1,5 | 3 | 5 | 10 | ||||||||||
| Ventaja del tornillo | [milímetro] | 4 | |||||||||||||
| Poder del motor | [Kilovatio] | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | ||||||
| Esfuerzo de torsión clasificado del motor | [N.M] | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | ||||||
| Velocidad clasificada del motor | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||||
| Fuerza clasificada del cilindro | [KN] | 1,76 | 3,53 | 5,29 | 6 | 6 | 6 | 6 | 6 | ||||||
| Cilindro Max. Force | [KN] | 6 | |||||||||||||
| Velocidad del cilindro | [mm/s] | 0-200 | 0-65 | 0-40 | 0-20 | ||||||||||
| Conexión del motor | Paralelo (impulsión de correa) | ||||||||||||||
| Ratio de reducción | 1 | 1,5 | 3 | 5 | 10 | ||||||||||
| Ventaja del tornillo | [milímetro] | 5 | |||||||||||||
| Poder del motor | [Kilovatio] | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | ||||
| Esfuerzo de torsión clasificado del motor | [N.M] | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | ||||
| Velocidad clasificada del motor | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||
| Fuerza clasificada del cilindro | [KN] | 1,41 | 2,82 | 2,12 | 4,23 | 4,23 | 6 | 6 | 6 | 6 | 6 | ||||
| Cilindro Max. Force | [KN] | 6 | |||||||||||||
| Velocidad del cilindro | [mm/s] | 0-250 | 0-165 | 0-80 | 0-50 | 0-25 | |||||||||
| Conexión del motor | Linear (impulsión directa de acoplamiento) | ||||||||||||||
| Ratio de reducción | 1 | 1,5 | 3 | 5 | 10 | ||||||||||
| Ventaja del tornillo | [milímetro] | 5 | |||||||||||||
| Poder del motor | [Kilovatio] | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | ||||||
| Esfuerzo de torsión clasificado del motor | [N.M] | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | ||||||
| Velocidad clasificada del motor | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||||
| Fuerza clasificada del cilindro | [KN] | 1,41 | 2,82 | 4,23 | 6 | 6 | 6 | 6 | 6 | ||||||
| Cilindro Max. Force | [KN] | 6 | |||||||||||||
| Velocidad del cilindro | [mm/s] | 0-250 | 0-80 | 0-50 | 0-25 | ||||||||||
| Conexión del motor | Paralelo (impulsión de correa) | ||||||||||||||
| Ratio de reducción | 1 | 1,5 | 3 | 5 | 10 | ||||||||||
| Ventaja del tornillo | [milímetro] | 10 | |||||||||||||
| Poder del motor | [Kilovatio] | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | ||||
| Esfuerzo de torsión clasificado del motor | [N.M] | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | ||||
| Velocidad clasificada del motor | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||
| Fuerza clasificada del cilindro | [KN] | 0,71 | 1,41 | 1,51 | 2,117 | 2,117 | 4,23 | 3,53 | 6 | 6 | 6 | ||||
| Cilindro Max. Force | [KN] | 6 | |||||||||||||
| Velocidad del cilindro | [mm/s] | 0-500 | 0-330 | 0-165 | 0-100 | 0-50 | |||||||||
| Conexión del motor | Linear (impulsión directa de acoplamiento) | ||||||||||||||
| Ratio de reducción | 1 | 1,5 | 3 | 5 | 10 | ||||||||||
| Ventaja del tornillo | [milímetro] | 10 | |||||||||||||
| Poder del motor | [Kilovatio] | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | ||||||
| Esfuerzo de torsión clasificado del motor | [N.M] | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | ||||||
| Velocidad clasificada del motor | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||||
| Fuerza clasificada del cilindro | [KN] | 0,71 | 1,41 | 2,117 | 4,23 | 3,53 | 6 | 6 | 6 | ||||||
| Cilindro Max. Force | [KN] | 6 | |||||||||||||
| Velocidad del cilindro | [mm/s] | 0-500 | 0-165 | 0-100 | 0-50 | ||||||||||
| Conexión del motor | Paralelo (impulsión de correa) | ||||||||||||||
| Ratio de reducción | 1 | 1,5 | 3 | 5 | 10 | ||||||||||
| Ventaja del tornillo | [milímetro] | 16 | |||||||||||||
| Poder del motor | [Kilovatio] | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | ||||
| Esfuerzo de torsión clasificado del motor | [N.M] | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | ||||
| Velocidad clasificada del motor | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||
| Fuerza clasificada del cilindro | [KN] | 0,44 | 0,88 | 0,66 | 1,32 | 1,32 | 2,65 | 2,21 | 4,41 | 4,41 | 6 | ||||
| Cilindro Max. Force | [KN] | 6 | |||||||||||||
| Velocidad del cilindro | [mm/s] | 0-500 | 0-500 | 0-265 | 0-160 | 0-80 | |||||||||
| Conexión del motor | Linear (impulsión directa de acoplamiento) | ||||||||||||||
| Ratio de reducción | 1 | 1,5 | 3 | 5 | 10 | ||||||||||
| Ventaja del tornillo | [milímetro] | 16 | |||||||||||||
| Poder del motor | [Kilovatio] | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | ||||||
| Esfuerzo de torsión clasificado del motor | [N.M] | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | ||||||
| Velocidad clasificada del motor | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||||
| Fuerza clasificada del cilindro | [KN] | 0,44 | 0,88 | 1,32 | 2,65 | 2,21 | 4,41 | 4,41 | 6 | ||||||
| Cilindro Max. Force | [KN] | 6 | |||||||||||||
| Velocidad del cilindro | [mm/s] | 0-500 | 0-265 | 0-160 | 0-80 | ||||||||||
| Conexión del motor | Paralelo (impulsión de correa) | ||||||||||||||
| Ratio de reducción | 1 | 1,5 | 3 | 5 | 10 | ||||||||||
| Ventaja del tornillo | [milímetro] | 20 | |||||||||||||
| Poder del motor | [Kilovatio] | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | ||||
| Esfuerzo de torsión clasificado del motor | [N.M] | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | ||||
| Velocidad clasificada del motor | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||
| Fuerza clasificada del cilindro | [KN] | 0,35 | 0,71 | 0,53 | 1,06 | 1,06 | 2,12 | 1,77 | 3,53 | 3,53 | 6 | ||||
| Cilindro Max. Force | [KN] | 6 | |||||||||||||
| Velocidad del cilindro | [mm/s] | 0-500 | 0-500 | 0-330 | 0-200 | 0-100 | |||||||||
| Conexión del motor | Linear (impulsión directa de acoplamiento) | ||||||||||||||
| Ratio de reducción | 1 | 1,5 | 3 | 5 | 10 | ||||||||||
| Ventaja del tornillo | [milímetro] | 20 | |||||||||||||
| Poder del motor | [Kilovatio] | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | 0,4 | 0,8 | ||||||
| Esfuerzo de torsión clasificado del motor | [N.M] | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | 1,27 | 2,55 | ||||||
| Velocidad clasificada del motor | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||||
| Fuerza clasificada del cilindro | [KN] | 0,35 | 0,71 | 1,06 | 2,12 | 1,77 | 3,53 | 3,53 | 6 | ||||||
| Cilindro Max. Force | [KN] | 6 | |||||||||||||
| Velocidad del cilindro | [mm/s] | 0-500 | 0-330 | 0-200 | 0-100 | ||||||||||
3. Usos
Equipos militares: el radar, el montador del misil, la plataforma del oscilación del vehículo blindado, el equipo especial y los otros buques de guerra y portilla de aviones, abertura, ajuste de altura de asiento, sistema de seguimiento del arma, actuador, ayuda de elevación experimental, ajuste de la acción de la dirección del cielo y tierra de la artillería del tanque, el empuje del combustible de cohete, la abertura de la puerta del horno, etc;
Equipo especial: la cadena de producción de la automatización industrial, la planta de fabricación, la transmisión de la logística, la plataforma de elevación, el control compensado, el control de la válvula, el manipulante coordinado, el cuchillo del CT Kama del equipo mecánico, la comida y la industria de la medicina, máquinas herramientas CNC, empaquetadora de la industria, prensa electrónica automotriz, indexación de direcciones de la máquina de bobina del equipo de la materia textil, mueren control de posición, afianzando con abrazadera, perforación, colocando;
Equipo experimental: Plataforma de la simulación, banco de pruebas, máquina de la onda, equipo de prueba etc.
Este tipo es especialmente conveniente para:
(1) máquina para hacer punto de la deformación, velocidad rápida y respuesta rápida
(2) el presionar, la cadena de producción del montaje de motor y usted servos pueden también comprar nuestro software acuciante servo junto.
![]()
![]()
4. Lista de piezas periférica
![]()
| Nombre | Explicación |
| 1- Pieza del montaje del pie de HNC/CRHNC | Cuando el motor es parall montado, esta parte se utiliza para instalar los transportes y los casquillos de extremo del reductor. |
| 2- Pieza del montaje del reborde de FNC/CRFNG | Cuando el motor es parall montado, esta parte se utiliza para instalar los transportes y los casquillos de extremo del reductor. |
| 3- Pieza del montaje del muñón de ZNCF/CRZNG | Cuando el motor es parall montado, esta parte se utiliza para instalar los transportes y los casquillos de extremo del reductor. |
| 4- Transporte del muñón de LNZG/CRLNZG | Para el muñón montado en el bloque de cilindro. |
| 5- Transporte de la horquilla del doble de SNC | Para el motor montó paralelo. |
| 6- Transporte esférico de la horquilla de la bisagra de LSNG | Para el motor montó paralelo, al transporte esférico. |
| 7- Transporte esférico de la horquilla de la bisagra de LSNSG | Para el motor montó paralelo, al transporte esférico, soldando con autógena síntesis. |
| 8- Pieza del montaje de la horquilla del doble de SNCS | Para el motor montó paralelo, al transporte esférico. |
| 9- Transporte de la horquilla del doble de LBG | Para el motor montó paralelo, al transporte esférico. |
| pieza doble aJ del montaje de la horquilla | Para el motor montó paralelo. |
| pieza del montaje de la horquilla del doble aA | Para el motor montó paralelo, al transporte esférico. |
| pieza del montaje de la horquilla del doble aB | Para el motor montó paralelo. |
| CA transporte de la horquilla | Para el motor montó paralelo. |
| transporte esférico de la horquilla de la bisagra del anuncio | Para el motor montó paralelo, al transporte esférico. |
| AE transporte del muñón | Para ser montada a cualquier posición del cilindro. Si el motor es paralelo montado, la posición de montaje no podría acercar al motor. |
| pieza del montaje del pie aF | Para el motor montó axialmente. |
| AG transporte de la junta | Con el transporte esférico. |
| ah reborde de conexión | Para compensar la desviación radial. |
| horquilla del doble aI | Para el oscilación del cilindro en un avión. |
| BJ uno mismo en pieza de la conexión | Para compensar desviaciones radiales y angulares. |
| transporte esférico de ángulo recto de la horquilla de la bisagra del Ba | Para el transporte común. |
| horquilla doble del bB | Para la instalación del oscilación del cilindro. |
| porque unidad rectora | Evite que el cilindro tuerza bajo alto esfuerzo de torsión |
| BD interruptores de proximidad | Para probar la posición, puede ser integrado en la ranura de montaje del sensor. |
| está la cubierta de la ranura | Para evitar que el polvo entre. |
| FB componentes de instalación paralelos | Para el motor montó paralelo. |
| BG componentes de instalación axiales | Para el motor montó axialmente. |
5. FAQ
Q: ¿Cuánto es su cantidad de orden mínima?
: 1 pedazo. Tenemos confianza que le satisfacen con nuestra producción.
Q: ¿Cuál es el precio del producto?
: El precio se basa en el tamaño, la especificación y los accesorios. Usted puede proporcionarnos la información detallada y el específico nos requiere después hará la selección modelo para usted y le dará la oferta formal.
Q: ¿Qué conturies y regiones hacen sus productos exportaron?
: Alemania, España, Italia, el Brasil, México, Japón, Irán, la India y etc. Utilizado principalmente para la máquina para hacer punto de la deformación y la máquina preesing. A propósito, muchos clientes substituyen los cilindros hidráulicos y los cyinders del aire por nuestros cilindros eléctricos servos.
Q: ¿Podría usted ofrecernos muestras libres?
: Triste no podemos. Pero no se preocupe, nosotros puede firmar el contrato de ensayo con usted. Si le satisfacen con la producción usted puede pedir un reembolso.
Productos recomendados